Si bien hace mucho que no publico en el blog, no he dejado de trabajar con AR2!! Hace unos meses ordené unas nuevas ruedas para el sistema de tracción en este
sitio, son unas
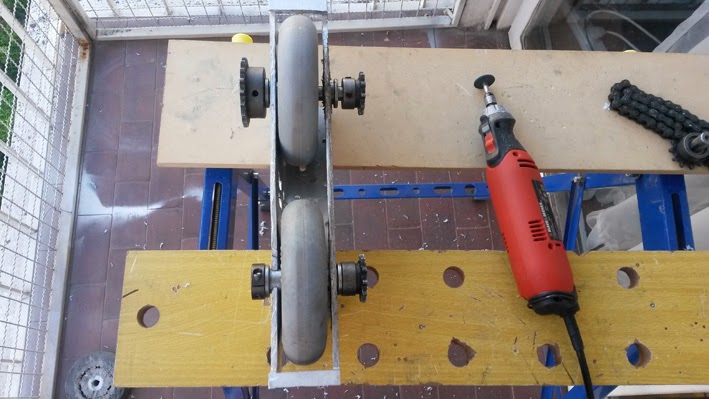
Colson wheel model 2.0005.561 (performa rubber round grey tread).
Las que tenía se me había roto una y no iban a durar mucho más ya que las tuve que achicar, cortándolas y haciendo que se desarmen.
A las nuevas ruedas les tuve que limar el hub para que entren en el tubo de aluminio. También les hice la muesca para que traben.
Hasta ahora las probé en casa y en un evento que incluyó andar por la vereda, asfalto y piso de cemento y anduvieron muy bien, soportando bien el peso y los movimientos.